La sabiduría de la multitud conectada
Los avances en las plataformas de computación móvil, junto con las innovaciones que permiten la IA en el borde (edge AI), han dado lugar a una explosión cámbrica de aplicaciones que detectan y perciben el mundo con una precisión sin precedentes.
La sabiduría de la multitud conectada
Los avances en las plataformas de computación móvil, junto con las innovaciones que permiten la IA en el borde, han dado lugar a una explosión cámbrica de aplicaciones que detectan y perciben el mundo con una precisión sin precedentes. Las pilas de percepción automotriz son solo un ejemplo (aunque probablemente el más destacado) de ello. Las cámaras que ayudan a detectar, rastrear y reaccionar ante objetos y situaciones alrededor de un vehículo son uno de los componentes clave de la tecnología que permitirá la autonomía total. Incluso hoy en día, impulsan la mayoría, si no todas, las soluciones de asistencia avanzada al conductor (ADAS) en producción masiva. Sin embargo, la detección visual sufre los mismos problemas que los ojos: solo pueden percibir lo que ven y se ven afectados negativamente por las inclemencias del tiempo, la mala iluminación y una variedad de otros factores ambientales. En tales circunstancias, la cantidad de potencia de cómputo disponible en un solo dispositivo o vehículo deja de ser relevante para el problema en cuestión. En cambio, debemos ampliar la perspectiva y observar el problema a escala, que es donde residen las posibles soluciones. Los vehículos conectados que recopilan datos automáticamente sobre el entorno y el comportamiento de conducción pueden convertirse rápidamente en un vasto canal de agregación de información de origen colectivo. Junto con otras modalidades de detección (Radar, Lidar), el uso de cartografía de origen colectivo se considera ahora el tercer pilar sobre el que descansa la realización de la autonomía total. La plataforma RideView de LightMetrics se encuentra en esa coyuntura. Lo que comenzó como una misión para permitir una integración y entrega más rápidas de soluciones de seguridad habilitadas para ADAS a las flotas, ahora se erige como un ecosistema vibrante de algunos de los proveedores de servicios telemáticos (TSP) más grandes e innovadores que impulsan soluciones de seguridad para conductores a través de RideView. Miles de conductores de vehículos comerciales y gestores de flotas en todo Estados Unidos y Canadá confían en alertas en tiempo real e información procesable para garantizar que sus flotas estén seguras las 24 horas del día. ¿Un subproducto inmensamente beneficioso de esto? Una red de miles de cámaras conectadas que recopilan una gran cantidad de datos anonimizados sobre señales de tráfico, calidad de las carreteras, patrones de comportamiento de conducción agregados y mucho más. Hoy, nos complace anunciar el lanzamiento de nuestro
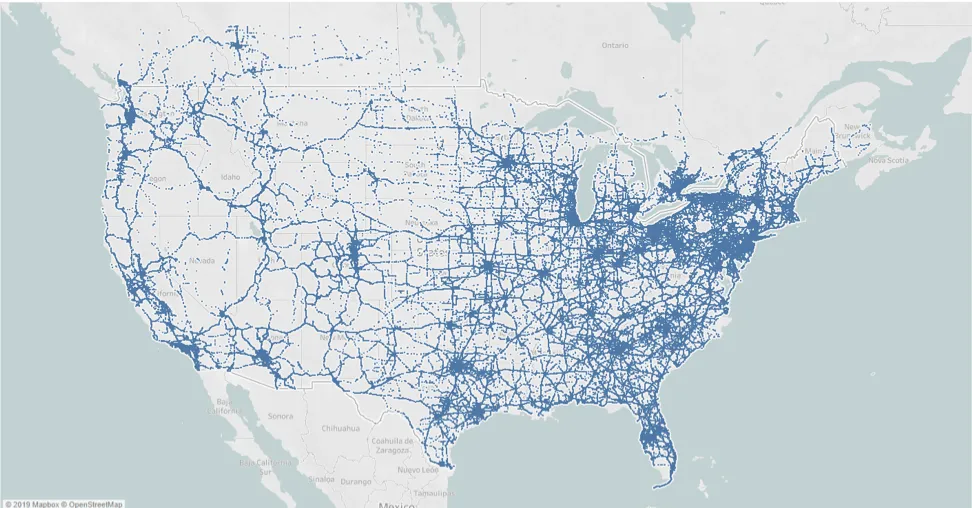
Generador de eventos de origen colectivo, una mejora de nuestro motor de generación de eventos basado en ADAS en tiempo real. El primer caso de uso que impulsa es el más sencillo y, sin embargo, en su elegancia presagia todo lo que es posible. El reconocimiento y cumplimiento de los límites de velocidad y las señales de PARE en tiempo real ha sido una propuesta de valor central de nuestra plataforma desde el principio. Se sabe que el exceso de velocidad es un indicador principal del riesgo de accidentes, y nuestras alertas al conductor en tiempo real ayudan a mitigarlo. Además, al no depender de bases de datos de límites de velocidad existentes que se actualizan con poca frecuencia, se garantiza que las flotas estén siempre al día con los límites que ven en la operación diaria. Sin embargo, como se mencionó anteriormente, existen puntos ciegos literales en tal dependencia exclusiva de la cognición visual. En condiciones climáticas adversas (niebla, lluvia, nieve, etc.), en condiciones de mala iluminación o incluso cuando obstáculos temporales ocultan una señal (piense en un camión de clase 8 en el carril más a la derecha), el sistema alcanza sus límites. Gracias a los miles de vehículos en nuestra plataforma, ahora tenemos una cobertura significativa y orgánica de las señales de tráfico en toda América del Norte, como se muestra en la figura anterior. Cada vez que un vehículo en nuestra plataforma detecta un nuevo límite de velocidad o una señal de PARE, se etiqueta con su ubicación y se agrega a un corpus en constante crecimiento. Un algoritmo de filtrado y consenso en el backend genera una base de datos depurada, de la cual solo una pequeña fracción se descarga y se aplica según la ubicación actual. Libres de las limitaciones de lo que percibe un solo sistema basado en visión, nuestros algoritmos ahora pueden "ver" en la oscuridad, bajo la lluvia e incluso cuando las señales están completamente ocultas por vehículos que pasan. La respuesta abrumadora de los primeros usuarios ha sido enfáticamente positiva, y esperamos ayudar a nuestros socios a llevar esto a los usuarios finales en los próximos meses. Dicho esto, aunque vemos esto como un hito importante, sigue siendo el primer día. En las próximas semanas y meses, implementaremos mejoras que aprovechen todos los datos valiosos que seguimos recopilando a escala. Desde la detección y difusión de señales temporales de límite de velocidad que aparecen en las zonas de trabajo, hasta alertar a los conductores sobre puntos críticos de accidentes o conducción imprudente con antelación, nos centraremos en habilitar casos de uso que brinden el mayor valor a nuestros socios y usuarios finales. En última instancia, vemos la potente IA en el borde junto con los ricos datos de origen colectivo como tecnologías interdependientes y sinérgicas que crearán un círculo virtuoso de innovación y valor para todas las partes interesadas en nuestro ecosistema.
